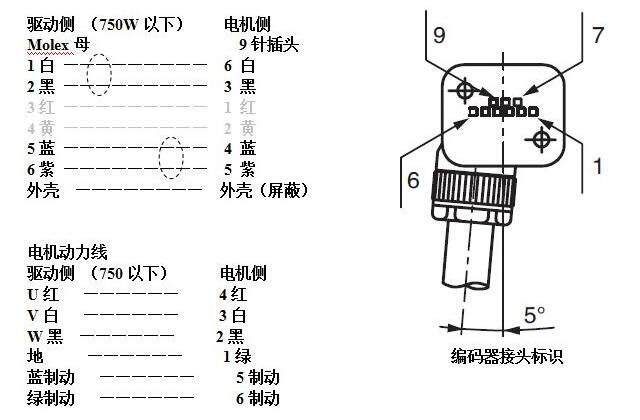
线和一般三相异步电机没什么不同。电源线从伺服驱动功率模块接到电机电源口。
,从伺服编码器口接到电机编码器口,伺服电机怎样接线,依据编码器信号,有些或许要加装中心转化设备。伺服电机接线图如下:
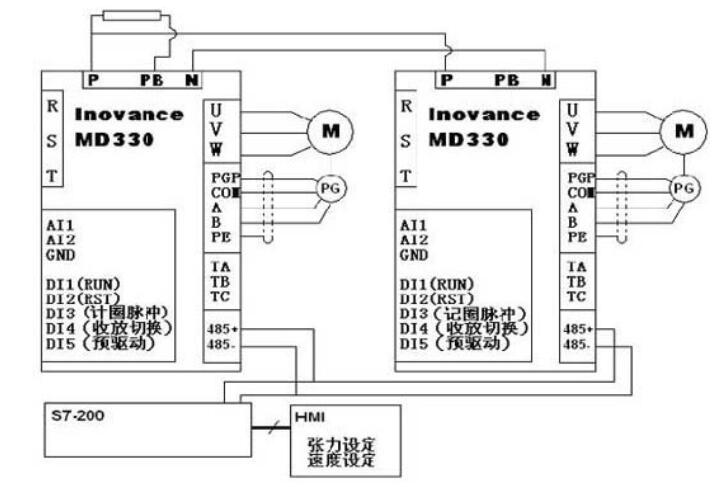
接线。主电路包含R、S、T三相线和U、V、W与电机的接线,PLC衔接驱动器的CN1(有些驱动器包含CN1A和CN1B),编码器与CN2衔接。难点是PLC输出线路与中继端子台的接线,要依据规划的基本要求来接。
是否过冲是很重要的,由于过冲或许会引起设备损坏、事端产生,乃至危及人员的生命安全。下面将详
,此计划不选用松下的方位操控模块FPG--PP11122122等,而是用晶体
方法 /
体系的行为类似于执行器,供给对速度、加快度和线性或视点方位的准确操控。它由四件事组成:直流
的类型有哪些? /
机器人的作业原理和技术参数 /
。有人能指出我正确的方向吗? 我找到了衔接到 Arduino 的阐明,但很难将其转化为我的设备。
体系? /
的运用在当时的工业环境下存在广泛的使用,小到家庭门窗窗布,大到航空航天。学会了
的差异 /
AMD Versal AI Edge自适应核算加快渠道之Versal介绍(2)
国产嵌入式DSP教育试验箱_操作教程:22-AD收集DA输出试验(收集输出正弦波)
【米尔-全志T113-i开发板试用】移植libmodbus库到米尔-全志T113-i开发板