空转假如主动运转中程序运转中止,而且机器人脱离程序编定的轨迹,则将进行空转。
假如在子程序中导致空转,则只在该子程序中履行空转运转。空转运转并不触及调用该子程序的那个程序。
在这些状况下,操控器将数字、二进制和模仿的输出端、存储器和旗标均置为 FALSE。尔后机器人移至轨迹上下一个程序编定的方位。抵达该方位时将进行空转。之前重置的信号将被相应赋值,就好象程序完毕运转时已抵达此方位。程序运转可接着来进行。
假如在一次空转之后将继续进行程序运转,则操控器的运作状况或许会与程序编定的不同。
1.空转进程中只可拜访输入端的当时状况。而该输入端在程序运转中或许有别的的数值。
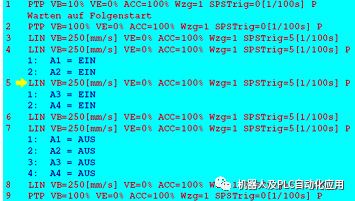
例如程序运转会因为行 5 处的句子挑选而内行 6 处被中止。内行 6 处输出端 A1... A4 为 TRUE。这些输出端现在被置为 FALSE。跟着 SAK 移动将缓慢地直接驶至所挑选的运动句子。抵达行 5 时机器人将中止,并履行空转,且输出端 A1 和 A2 将从头被置为 TRUE。程序运转可继续进行。
点击发动反向运转键,一切输出端、符号器和旗标均被赋值为 FALSE。将按程序编定的轨迹反向运转。此刻将不考虑逻辑指令及子程序调用。假如经过按下发动正向运转键从头改动方向,则将履行空转运转。
脱离轨迹时,将只要数字和模仿输出端被重置。二进制输出端、符号器和旗标的状况均不更改。经过发动键可将机器人重置回它脱离轨迹的方位处。空转之后数字和模仿输出端将被置为脱离轨迹之前的状况。
文章出处:【微信号:gh_a8b121171b08,微信大众号:机器人及PLC主动化使用】欢迎增加重视!文章转载请注明出处。
操控柜三维模型,做计划有时要使用到,我们谁有能够给我发一份吗?先谢谢了
一切的动作都是依照以枪头为顶点来完结移动,XYZ方向切开枪方向不改动,假如
处于主动运转时,先要在手动状况时分挑选需求运转的程序,然后经过钥匙开关切换
及数控加工中心等主动化设备中。是用来操控伺服电机的一种操控器,其效果类似于
伺服电机内含有精细检测器,因而,当产生磕碰、冲击时或许会引起毛病,在对库卡
MGV电源模块修理PH1013-2840MGV电源修理 库卡电源模块修理
、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构分类:不同
SCARA机械臂:笛卡尔机械臂:Delta并联机械臂:双平行四边形机械臂(
MGV电源模块修理PH1013-2840MGV电源修理 库卡电源模块修理
MGV电源模块修理PH1013-2840 /
详解S7-1500CPU与ET200SP进行ProfinetIO通讯的装备进程
深化了解完成最高效数据转化的Achronix JESD204C解决计划