交流伺服驱动器主要由主电路和控制电路两部分所组成。主电路为伺服电机的运转提供一定幅值和频率的电流。控制电路通过闭环控制生成PWM控制信号,对主回路的输出电流进行调节,以此来实现伺服电机位置、速度及扭矩的精确控制。
交流伺服驱动器的主电路主要由整流器,直流环节和逆变器三部分所组成,如下图所示:
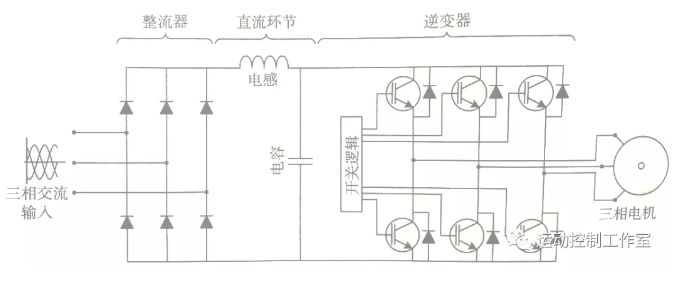
整流器将输入的三相交流电,整流成直流电。从下图能够准确的看出,整流器输出的直流电中含有一定的纹波。
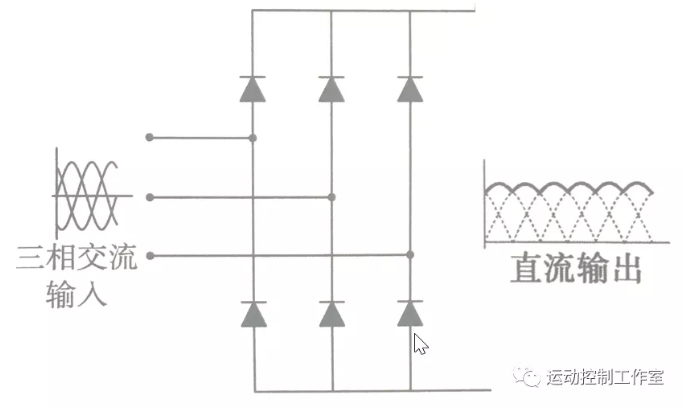
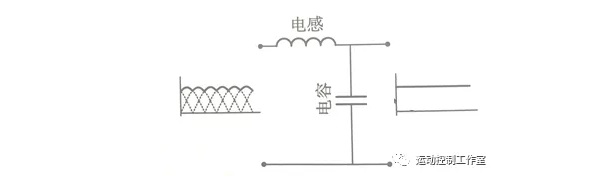
直流环节的最大的作用是滤波。把整流输出的带一定纹波的直流电,过滤成平滑输出的直流母线电压,然后把平滑的直流电压提供给逆变器。
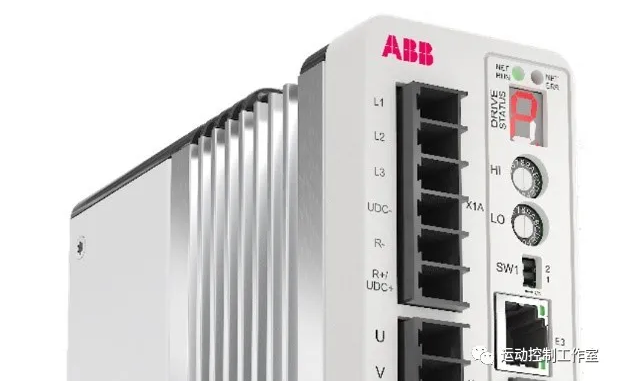
三相交流供电,又是整流又是滤波的,直接用直流供电难道不行吗,费那事干嘛?现在有的高端伺服驱动器,也支持直流供电。即直接把直流电输入给逆变器,如ABB的Microflexe190和Motiflexe180系列。下图的UDC+和UDC-即Microflex e190伺服驱动器的直流供电端子。
逆变器通过开关逻辑(PWM控制信号)控制开关元件的通断,将直流电转变成交流输出。逆变器部分电路如下图所示:
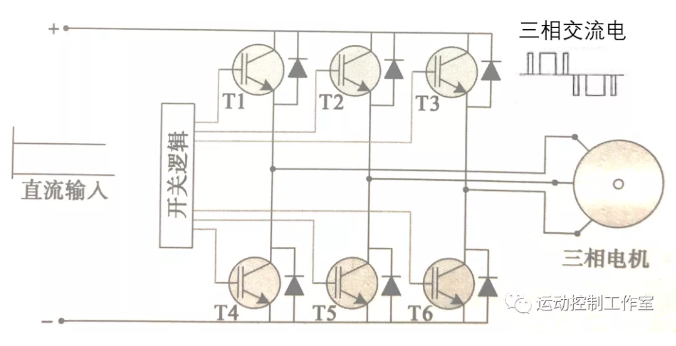
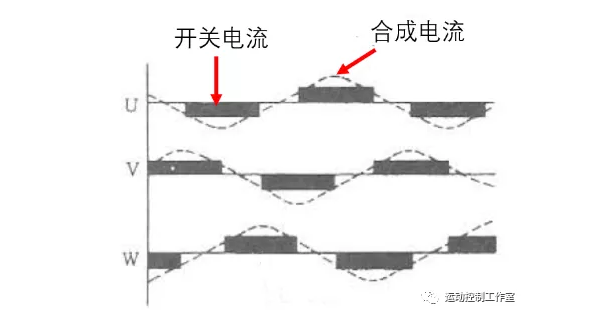
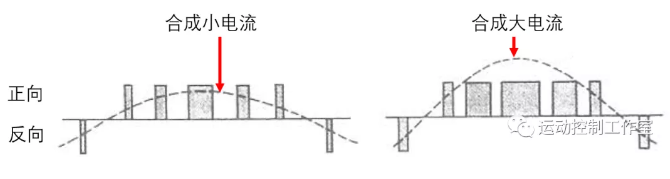
开关元件,即上图中的T1~T6。在新型伺服驱动器中,开关元件普遍采用IGBT。通过开关逻辑控制T1~T6的通断,即可精确控制导入伺服电机定子中三相的电流的幅值和方向,以此来实现伺服电机的精确控制。逆变器直接把电流注入伺服电机定子的U V W三相线圈。U V W线圈中通的电流波形和频率是怎样的呢?逆变器的输入是直流电,经过T1~T6通断的逻辑控制,输出的理应是直流电啊。这里涉及到PWM的概念。其实逆变器输出的是一系列占空比和方向可变的方波开关电流。由于方波通断切换非常快,负载不受开关状态的影响,而仅能看到电压的平均值。通过PWM算法的开关逻辑,使方波开关电流等效于频率和幅值可变的三相交流电,以此来实现控制伺服的目的。
控制电路的输出,经过控制逆变器的开关逻辑,实现对逆变器输出电流的控制。现在常用的是脉冲宽度调制(PWM)控制。伺服驱动器控制回路,电路环、速度环、位置环算法的终极目的,都是为了生成理想的PWM控制信号。
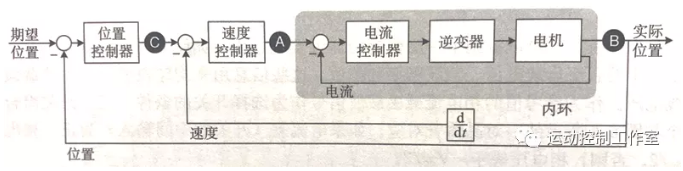
一般取伺服电机两相的检测电流直接反馈给控制电路的电流环,从伺服电机的编码器检测实时位置反馈给位置环,实时位置微分后反馈给速度环。控制回路根据反馈和输入指令,生成PWM控制信号,控制主回路逆变器的通断。
基于信息中介 —— 专项服务 —— 全程代理的发展路径,为技术经理人提供培训认证、备案管理、业务支撑等服务,为区域培养一支专业化程度高、服务能力强的技术经理人队伍。
以构建人机一体化智能系统创新服务体系为目标,整合线上线下资源,精选人机一体化智能系统优质服务商, 解决企业智能化改造需求,助力区域制造产业向数字化升级、高端化发展。
为地方政府部门构建无需线下空间的新型科创飞地/为地方创新载体提供运营赋能,采用“1+N”的模式,即以1个城市为“中心飞地”,以多城市为“云飞地”,打造网络化、全国化的科技招引和创新服务体系。
促进高校、科研院所等的科技成果、技术能力向产业、公司进行转移转化与应用 服务对象:高等学校、科研院所、大型企业
优质的技术项目是创新创业发展的重要依托,企业打造并布局与自身优势有效结合的优质技术项目,有助于企业在市场之间的竞争中构建坚实的壁垒。
帮助企业精准、高效、专业地对接目标城市、产业园区,获取存在竞争力的产业集群资源、产业政策保障,结合科易网既有的技术转移侧资源及服务优势,让企业透过“走出去”,进行机构外设爬坡越坎,获得更好的市场竞争力。
科城共创(科易网)技术经纪主题系列活动(“新技术新产品新模式”政策解读专场)第十四期成功举办